Collective intelligence and swarm behaviours applied to multi-agent systems.
About Me
Who am I?
I'm Fernando -
I am a PhD in Space Research / Computer Science at the University of Alcalá (UAH) , Alcalá de Henares, Madrid, Spain. I received my PhD degree from the UAH in 2020. Previously, I received the B.Sc. Computer Science degree and the M.Sc. degree in Space Science & Technology from the University of Alcalá, in 2015 and 2016, respectively. I conducted my research from 2015 till 2021 at the Intelligent Systems Group at UAH. My PhD is focused on autonomous multi-robot cooperation, studying cooperation paradigms where robots can deploy collective intelligent behaviours. My main research interests are routing technology, multi-robot coordination and high-level planning, with particular emphasis in path planning and optimization methods. My research was supervised by Prof. Dr. María D. R-Moreno and Dr. Pablo Muñoz.
During 2019, I conducted a research stay in the Delft Center for Systems and Control (DCSC) at TU Delft. There, I worked on the modelling and testing of a cooperation paradigm for a team formed by unmanned ground vehicles and unmanned aerial vehicles. The research outcome of this project was a dynamical and efficient path planner which allows to the multi-robot team performing exploration tasks for search and rescue, package delivery or surveillance scenarios.
- 28.05.1992
- 32
- Munich, Germany
- Familiy, Friends, Sports
- University of Alcalá, Spain
- PhD in Space Research
- fropero11@gmail.com
- Ropero's Proffesional Profile
- Ropero's Research
- https://orcid.org/0000-0001-5561-7874
Education
Research Positions
2022 - Present
Senior Research Engineer in Huawei Technologies Co., Ltd.
R&D in routing and navigation for geospatial applications
2019
Visiting researcher at TU Delft
Focused on task/path planning for multi-robot cooperation
2017 - 2021
Research Scientist at University of Alcalá
Autonomous multi-robot cooperation
2015 - 2017
Postgraduate researcher at University of Alcalá
Scientific research in cooperative control and optimization methods
2014 - 2015
Research technologist at University of Alcalá
Technological research applied to robotics
Research Interests
Meet my research interests beyond my PhD-
Cooperative Control
-
Optimization Methods
Game Theory and Control Theory methods applied to multi-robot cooperative paradigms.
-

Computational Geometry
Combinatorial computational geometry methods for optimization in multi-robot scenarios.
-
Quantum Computing
Quadratic Unconstrained Binary Optimization models following the Ising Formulation.
-

Physics
Particle physics and fundamental interactions explained by the Standard Model.
-

Astrophysics
The stars, galaxies or extrasolar planets evolution through their electromagnetic radiation.
Recent Posts
Check out my latest news and research works-
May 12, 2021 Research
Drone services have potential for generating economic growth and societal benefits such as ...
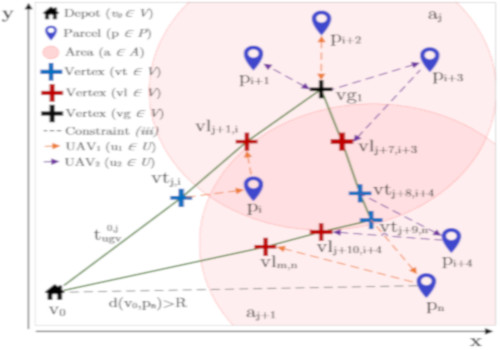
The demand for drone services is steadily increasing, due to the potential of generating economic growth and societal benefits such as the environmental impact on decarbonisation. Surveillance, infrastructure inspections or delivery of goods are examples of services that can be enhanced using Unmanned Aerial Vehicles (UAVs). Driven by these potential benefits, We consider the scenario of package delivery through the cooperation of an Unmanned Ground Vehicle (UGV) and multiple UAVs. The problem is formulated as a generalization of the last-mile delivery problem, where a UGV carries an ensemble of UAVs through intermediate points among the customer locations from where the UAVs are able to perform the last-mile delivery. The goal is to minimize the total delivery time of a set of packages. To do this, we have to focus on key problems in parcel deliveries with UGV–UAVs cooperation: the time spent travelling among customer locations throughout a heavy road traffic congestion and the waiting delays for rendezvous between the UGV and the UAVs after a delivery. In this paper, we present an approach that implements a geometrical rendezvous method for exploiting the long distances among customers to minimize the waiting delays and the UGV travelling time while minimizing the total delivery time. Our strategy follows a sorted set of stages merging clustering and classic combinatorial techniques with modern evolutionary approaches. The solution has been tested in several simulation runs with different delivery points distributions, demonstrating that our approach is able to generate a coordinated task planning that solves the formulated problem. Moreover, the analysis of the solutions reveals the existence of a sub-optimal number of UAVs. Also, a numerical comparison with other approaches reveals the main aspects to consider in order to deploy the solution in real scenarios, such as the customer distributions, urban area exposed to road traffic or number of UAVs.
Submitted, under review.
-
March 14, 2019 Research
Cooperation in heterogeneous robotics teams is getting attention from multiple areas, such as surveillance ...
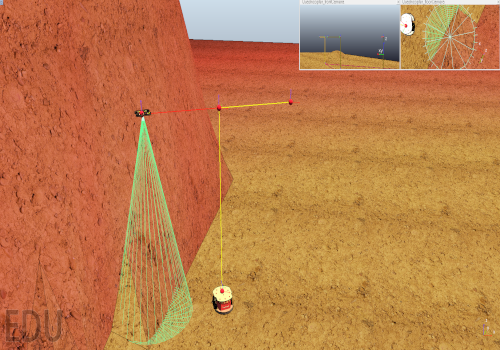
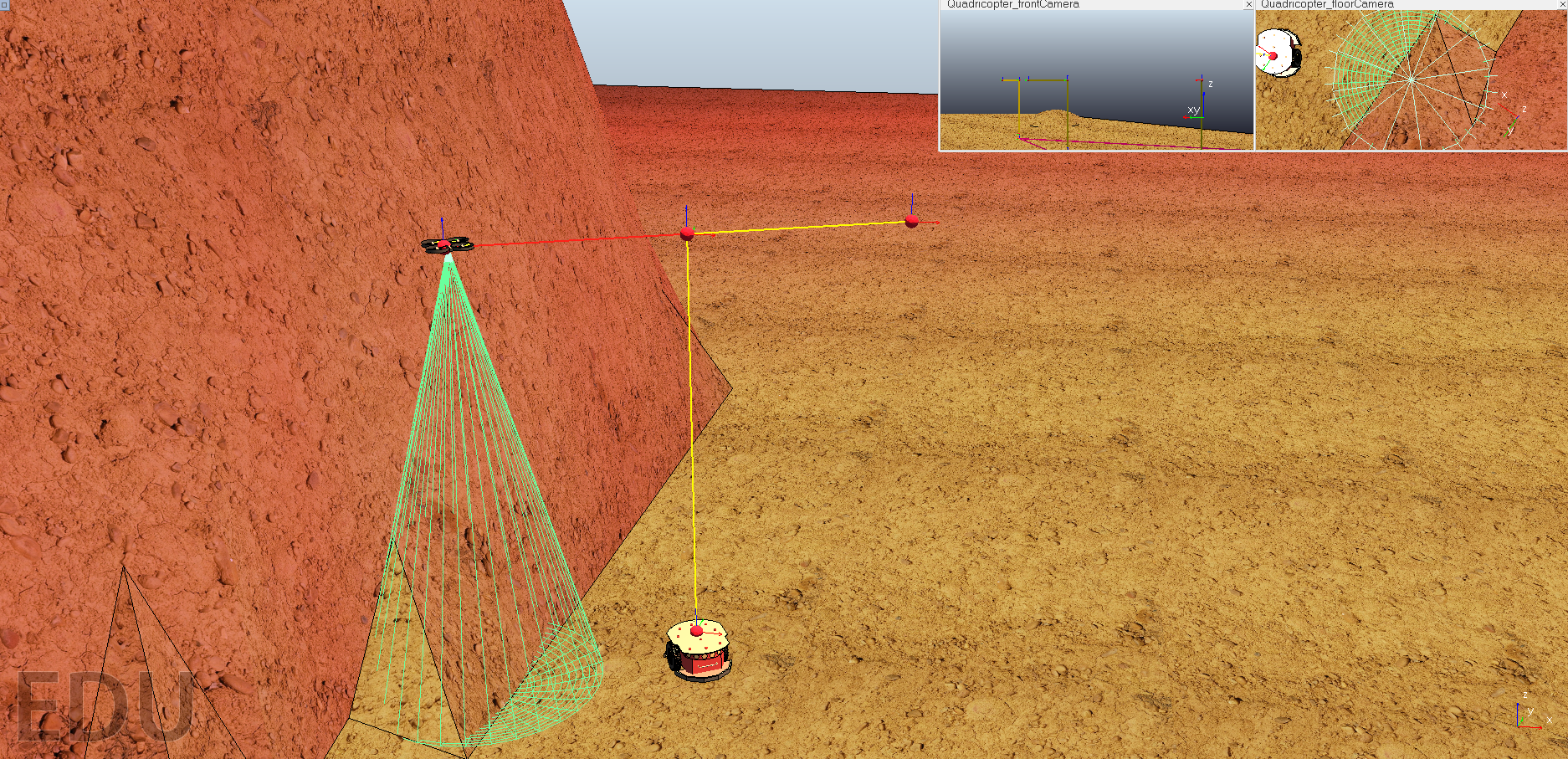
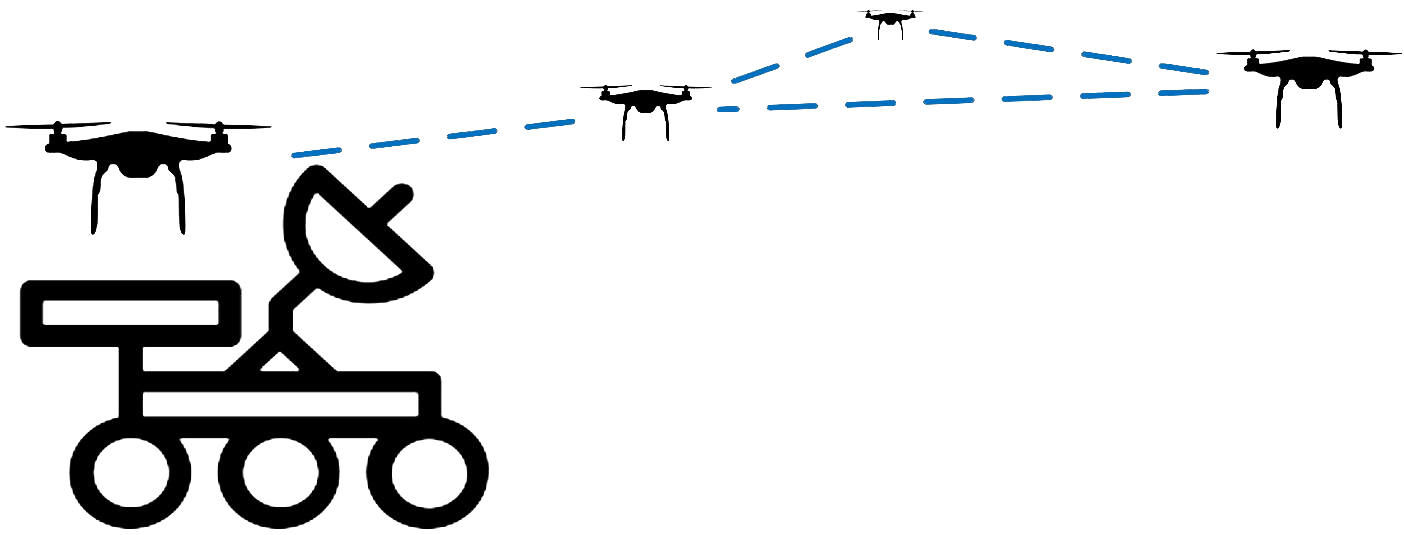
Cooperation in heterogeneous robotics teams is getting attention from multiple areas, such as surveillance, search and rescue or space exploration. Heterogeneous robots teams can exploit advantages of each robotic platform, allowing to operate simultaneously on-ground, air and in water environments, which is usually not suitable for homogeneous swarms. Focusing on space exploration, NASA considers a multiple robot team for future Mars explorations in order to maximize the scientific return, by means of the cooperation of a rover and an aerial drone. However, the cooperation between them in such challenging scenario entails several problems, that, in general, require the inclusion of autonomy. In this sense, autonomous controllers are known as expertise entities that enable the cooperation and coordination in multiple robot systems, allowing the robot team to cope with flexibility, scalability and fault tolerant capabilities. This article describes the Autonomous coopeRatIve Execution System (ARIES), an autonomous controller designed for the deployment of cooperative robot teams. ARIES is based on the leaderfollower approach where both leader and follower(s) are intelligent agents built on top of the Teleo-Reactive EXecutive (T-REX) system. T-REX is a multi-agent architecture that interleaves sensing, planning and execution. Nevertheless, T-REX is not a suited architecture for multirobot cooperation. In this way, the objective of ARIES is to enable the cooperation among distributed agents in a T-REX based architecture. We present a study case to demonstrate the ARIES capabilities in a particular exploration scenario simulating a hybrid UGV-UAV system.
Published Paper: F. Ropero et al., (2019)
-
February 15, 2019 Visiting TU Delft
During the stay in TU Delft, I will work along with the Delft Center for Systems and Control (DCSC) in ...
During the stay in TU Delft, I will work along with the Delft Center for Systems and Control (DCSC) in the modelling and testing of a cooperation paradigm for a team formed by unmanned ground vehicles and unmanned aerial vehicles. The objective is to design a fully automated and efficient package delivery system.
Amazon is one of the greatest e-commerce companies in the world, mainly well-known because of its short time and reliable deliveries. Nevertheless, e-commerce is becoming than trendy activity that even Amazon requires to update its resources to meet the high demand of buying and selling products and so, be competitive with the rest of e-commerce companies. This leads to Amazon to keep researching for novel solutions that hold it at the top of e-commerce companies ranking. In this way, the Exploration Problem above mentioned is easily adaptable to build a future Amazon’s package delivery system where a UGV-UAV multi-robot system cooperates to deliver the packages around the world.
In the Package Delivery domain, the problem is to deliver a set of packages in a large-scale area, such as a city, i.e., Madrid. Let’s suppose that Madrid has its own warehouse from where the multi-robot team starts and finishes their daily deliveries. Let’s suppose that the UGV carries a set of UAVs and a set of packages for delivering. Also, let’s suppose the constraints denoted by the Exploration Problem.
Then, as a daily routine, the objective is to find a cooperative routing for the UGV-UAV multi-robot system to allow the UAVs to deliver every package while trying to minimize the delivery time. Following the cooperative approach, the UGV is a moving charging station which carries the UAVs through strategic central nodes from where the UAVs start and end their deliveries. Each central node is linked to a sub-set of deliveries. On each sub-set, the UAVs plan a route considering flying back to the UGV to recharge its battery to avoid run out of energy, then, it performs recharging in the UGV. This autonomous delivery system aims to maximize the number of parallel deliveries through the minimizing of the distance travelled by the UGV-UAV multi-robot system.
-
December 1, 2018 Research
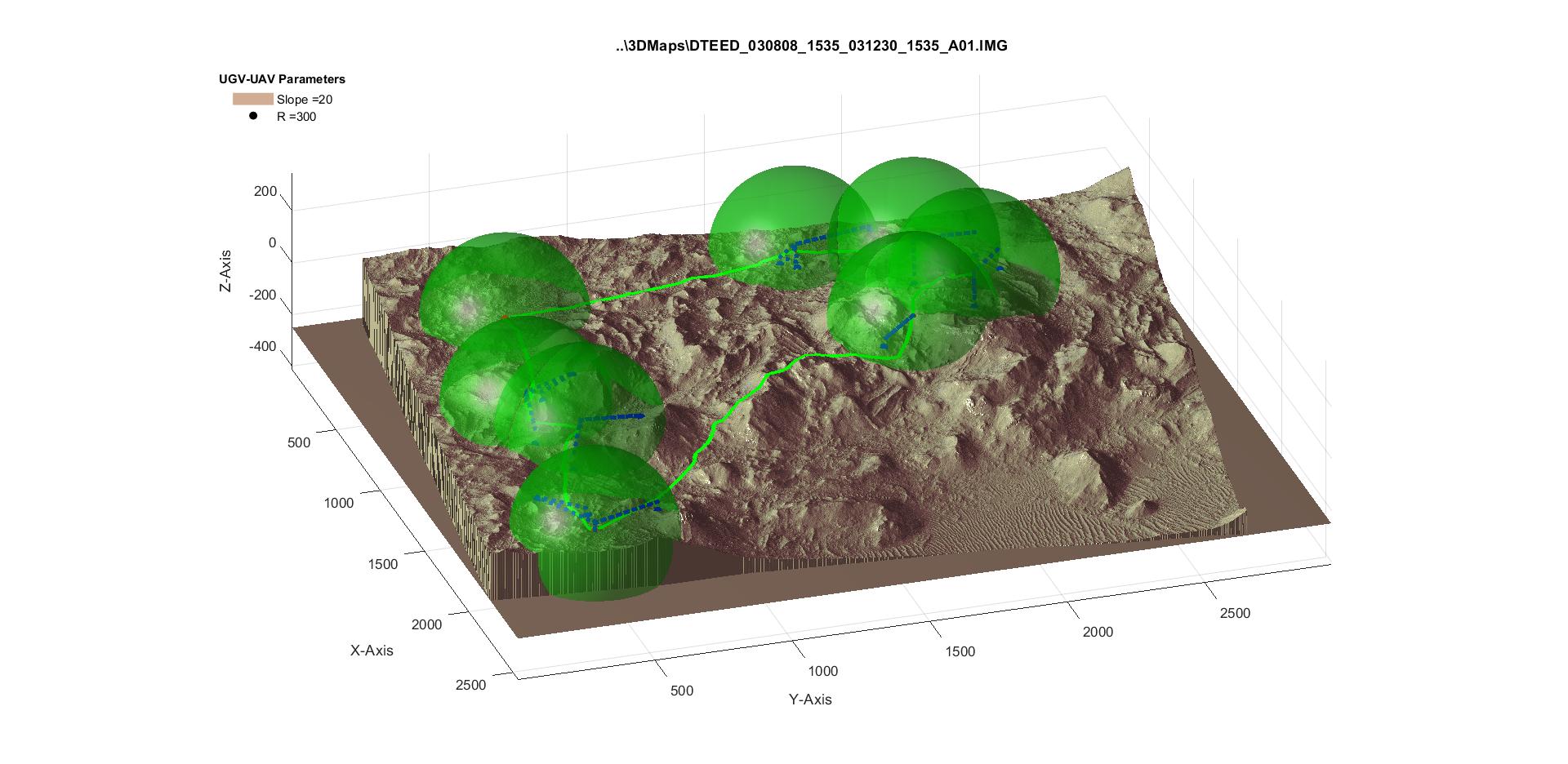
This work is related to the scenario of exploring a planetary surface with a system formed by ...
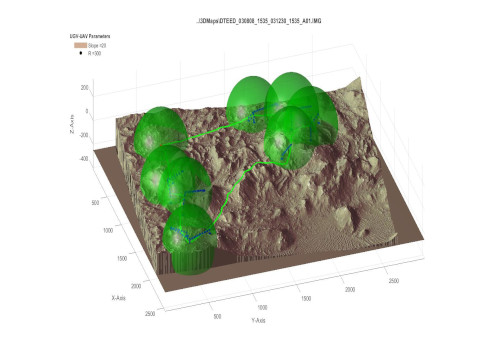
This work is related to the scenario of exploring a planetary surface with a system formed by an Unmanned Aerial Vehicle (UAV) and an Unmanned Ground Vehicle (UGV). The scenario's goal is to reach a set of target points minimizing the travelling distance. Some expected key problems in planetary explorations are the UGVs functionality constraints to reach some target points as a single robot system and the UAVs energy constraints to reach all the target points on its own. We present an approach based on the coordination of a hybrid UGV–UAV system, in which both robots work together for reaching all the target points. Our strategy proposes the UGV as a moving charging station to solve the UAV energy constraint problem, and the UAV as the robotic system in charge of reaching the target points to solve the UGV functionality constraints. To overcome this problem, we formulate the cooperaTive ExploRation Routing Algorithm (TERRA), which merges combinatorial classic techniques and modern evolutionary approaches aiming to optimize the travelling distance.
Published Paper: F. Ropero et al., (2019)